Vatsanai Jaiton
Ph.D in Information Science and Technology
BRAIN Lab, IST, VISTEC
Email: vatsanai.j_s18@vistec.ac.th
Vidyasirimedhi Institute of Science and Technology (VISTEC)
Wangchan Valley
555 Moo 1 Payupnai, Wangchan, Rayong 21210 Thailand
Biography
Vatsanai Jaiton (Oh) was born in Yasothon, Thailand, in 1989. Currently, he is a Ph.D. candidate at the Bio-inspired Robotics and Neural Engineering laboratory (BRAIN Lab), School of Information Science and Technology (IST), Vidyasirimedhi Institute of Science and Technology (VISTEC), Thailand. He received his B.Eng. degree in instrumentation engineering with second-class honors from the King Mongkut’s Institute of Technology Ladkrabang, Thailand in 2015. His curriculum vitae is available at: (CV_Link), and details of his research background can be found at: (Research_Link)).
Research Interests
Unmanned Aerial Vehicles (UAVs); Autonomous Robots; Service and Inspection Robots; Neural Control for Navigation and Exploration; Neural Control for Aerial Robotics; Embodied AI and Neurorobotics; Embedded AI and Energy-Efficient Neural Computing Systems; Neural Dynamics, Learning, and Plasticity; Machine Learning for Robotics; Machine Learning and AI for Process Control and Automation; Intelligent Instrumentation and Control Systems.
Academic Background
Oct. 2025 – now Visiting Ph.D. Researcher in the Research Group for Neuromorphic Computing at the Zurich University of Applied Sciences (ZHAW), Wädenswil, Switzerland
2018 – now Ph.D. student at the Bio-inspired Robotics and Neural Engineering Laboratory (BRAIN Lab), School of Information Science and Technology (IST), Vidyasirimedhi Institute of Science and Technology (VISTEC), Thailand
2011 – 2015 B.Eng. degree in instrumentation engineering with second-class honors from the King Mongkut’s Institute of Technology Ladkrabang, Thailand
2002 – 2008 High School at Mahachanachai Wittayakom School, Yasothon, Thailand
Publications
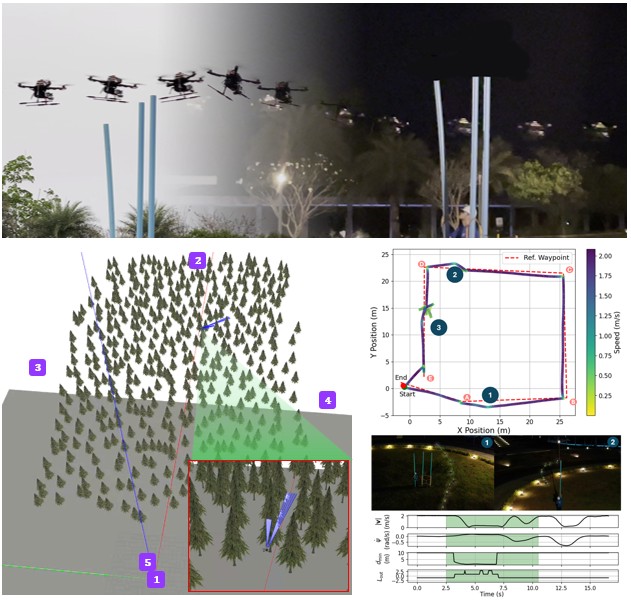
T. Phetpoon, V. Jaiton, K. Rothomphiwat, M. Manawakul, P. Chirathanyanon, P. Ritmetee, P. Manoonpong Multimodal Obstacle Detection and Adaptive Neural Control for Autonomous Drones, The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), Hangzhou, China, 2025, pp. 3495-3502, doi: 10.1109/IROS60139.2025.11246601.
V. Jaiton and P. Manoonpong, Neural Dynamics and Synaptic Plasticity in Simple Networks Drive Lévy Flight Foraging and Obstacle Avoidance Behaviors for Bio-inspired Autonomous Flight, Neural Networks, vol. 192, p. 107913, 2025, doi: 10.1016/j.neunet.2025.107913, https://doi.org/10.1016/j.neunet.2025.107913.
Jaiton, V., Jadhav, P. D., Rothomphiwat, K., Phetpoon, T., Tarapongniwat, K., Manoonpong, P. (2025) An Integrated Adaptive System for On-Pipe Landing and Adherence of Autonomous Inspection Drones, IEEE/SICE International Symposium on System Integration (SII) 2025, https://ieeexplore.ieee.org/document/10871060.
Jaiton, V., Manoonpong, P. (2025). Neural Chaotic Dynamics for Adaptive Exploration Control of an Autonomous Flying Robot. In: From Animals to Animats 17. SAB 2024. Lecture Notes in Computer Science, vol 14993. Springer, Cham. https://doi.org/10.1007/978-3-031-71533-4_19. (pdf)
Jaiton, V., Rothomphiwat, K., Phetpoon, T., Manawakul, M., Manoonpong, P. (2024) An Integrated Adaptive Control System for Obstacle Detection and Online Speed Adaptation of Autonomous Drones, IEEE/SICE International Symposium on System Integration (SII) 2024, Ha Long, Vietnam, 2024, pp. 1355-1356, doi: 10.1109/SII58957.2024.10417272. (pdf)
Mingchinda, N., Jaiton, V., Leung, B., Manoonpong, P. (2023) Leg-body coordination strategies for obstacle avoidance and narrow space navigation of multi-segmented, legged robots, Frontiers in Neurorobotics, doi: 10.3389/fnbot.2023.1214248 (link)(videos)
Jaitona, V., Manoonpong, P. (2023) Neuro-Lorenz Oscillator with Bias Adaptation for Adaptive Searching and Exploring Behaviors of Flying Systems. Proceedings of The 11th International Symposium on Adaptive Motion of Animals and Machines (AMAM2023). 2023, p. 113-114, DOI: https://doi.org/10.18910/92293 (pdf)
Mingchinda, N.; Jaiton, V.; Leung, B.; and Manoonpong, P. (2022) Neural Body Bending Control with Temporal Delays for Millipede-Like Turning Behaviour of a Multi-Segmented, Legged Robot, From Animals to Animats 16. SAB 2022. Lecture Notes in Computer Science, pp. 52-63 (EI), DOI: https://link.springer.com/chapter/10.1007/978-3-031-16770-6_5 (pdf)
Jaiton, V., Rothomphiwat, K., Ebeid, E.S. and Manoonpong, P. (2022) Neural Control and Online Learning for Speed Adaptation of Unmanned Aerial Vehicles, Frontiers in Neural Circuits, DOI: https://doi.org/10.3389/fncir.2022.839361 (video)(video summary)
Jaiton, V., Manoonpong, P. (2021) Chaotic Neural Oscillator for Navigation and Exploration of Autonomous Drones, Proceedings of The 9.5th International Symposium on Adaptive Motion of Animals and Machines (AMAM2021), DOI: https://doi.org/10.18910/84868
Social Activities
2022 – now Project Leader of a rural community development project, Developing Community-Based Joint Production and Network Marketing, supported by Equitable Education Fund (EEF), in Yasothon, Thailand
2019 – now Consultant & coordinator of Ban Kutphankhiao Youth Development Club to empower and support youth to a bright future, in Yasothon, Thailand
2020 – 2021 Team Leader of food and drink transportation management for homecare/home isolation COVID-19 patients of Ramathibodi (Chakri) Hospital, Samutprakarn, Thailand
Experiences
Research Assistant at VISTEC (July– August 2018)
- Designed and made an exoskeleton suit mockup for the greeting with Her Royal Highness, Princess Sirindhorn
Maintenance Engineer (Instrument and Control) at SCG Chemicals, (August 2015 - June 2018)
- Maintained and improved machine/process performance in the field of instrumentation and control systems in petrochemical plant
TFT Campus Leader (KMITL) at Teach for Thailand, (2014 - 2015)
- Coordinated and conducted activities between Teach for Thailand and KMITL
Instrument Student Leader at KMITL, (2012 - 2015)
- created and led student activities
- cooperated activities with alumni and department/engineering faculty
Student Intern at DOW Chemicals, (June - July 2014)
- Practiced process instrumentation maintenance, calibration, and troubleshooting in a maintenance system
Student Intern at Chevron (Thailand), (March-May 2014)
- Worked on the project entitled “Control Objective Analysis” regarding objective and operating performance on each element in the closed-loop control
Honours & Awards
- Best Senior Project Award (2014)
- Chevron Internship Scholarship: on the appraisal of working performance (2014)
- DOW Chemicals Internship Scholarship (2013 - 2014)
- Excellent Scholarship: KMITL (2013)
- Chumbhot - Pantip Foundation Scholarship (2012 - 2014)
- KMITL Scholarship (2011 -2014)
- Toshiba Foundation Scholarship (2011 - 2014)